Hoe werkt navigatie echt?
Dankzij satellietnavigatie is het (vrijwel) onmogelijk om de weg kwijt te raken. Vliegtuigen, schepen en ook auto's en motoren maken veelvuldig gebruik van diverse soorten (ingebouwde) navigatiesystemen. Deze systemen zijn voor een correcte werking weer afhankelijk van een ander systeem dat navigatie-informatie verstrekt. Het systeem waar al langere tijd gebruik van wordt gemaakt is het NAVSTAR (NAVigation Satellite Timing And Ranging). Dit systeem, eigenlijk bedoeld ten behoeve van diverse militaire doeleinden van en voor de Amerikaanse strijdkrachten, werd in de jaren 90 door de toenmalige president Reagan, ook voor bepaalde civiele doeleinden vrij gegeven. Sindsdien wordt veelvuldig gebruik gemaakt van NAVSTAR. In deze bijdrage een beschrijving over hoe navigatie met NAVSTAR in zijn werk gaat.Navigatie
Navigatie is een begrip afkomstig uit de scheepvaart. Het woord is een samenvoeging van de Latijnse woorden navis (voor schip) en agere (dat sturen of beheren betekent). Vrij vertaald is navigeren dus het besturen van een vaar- of voertuig om het (veilig) van a naar b te brengen. In de barre tijden voordat er (goede) zeekaarten bestonden werd vooral gebruik gemaakt van een kompas en magnetisme om in elk geval een vrij grove vaarrichting te kunnen bepalen en aanhouden. Uit archeologische vondsten in Amerika zou zijn gebleken dat de Vikingen magnetische elementen (magnetisch gesteente zoals magnetiet) zouden hebben gebruikt om hun schepen vanuit hun woon- en leefgebied (huidige Scandinavië) naar Amerika te loodsen en weer terug. De Vikingen ontdekten dat magnetisch gesteente de neiging had om steeds in een bepaalde richting te wijzen. Door een kant te markeren was het navigeren redelijk eenvoudig. Als de gemarkeerde kant bij de heenreis naar rechts wees, dan moest die kant bij de terugreis naar links wijzen om op de juiste weg te reizen. Die eerste magnetische elementen zijn later tot moderne kompassen doorontwikkeld zoals we die ook nu nog kennen.Zee- en landkaarten
De eerste en echt bruikbare zeekaarten werden in de dertiende eeuw gemaakt door tekenaars aan boord van schepen. Deze eerste cartografen tekenden het verloop van de zichtbare kustlijnen op kaarten en markeerden daarop ook andere zichtbare elementen zoals atollen en kleine eilandjes. Door andere uitvindingen zoals ballonvaart kon het land, in elk geval bepaalde gedeelten daarvan, vanaf een bepaalde hoogte worden bekeken en dat leverde weer andere inzichten op waarmee kaarten konden worden verbeterd. Vanuit de lucht is er minder hinder van de aardkromming en kon men verder zien. In de huidige tijd kan op de modernste technieken worden teruggevallen waarmee kaarten worden gemaakt zoals luchtfoto's van zeer hoge kwaliteit gemaakt vanuit vliegtuigen en door satellieten. Ofschoon er nog altijd papieren kaarten worden vervaardigd wordt in veel gevallen toch meer gebruik gemaakt van digitale versies. Navigatiesystemen in vliegtuigen, op schepen en in voertuigen zijn op het toepassen van digitale kaarten ingesteld.Global Positioning System (GPS)
Het huidige gps systeem dat voor navigatiedoeleinden wordt gebruikt is het NAVSTAR systeem (op basis van 24 satellieten) dat ten behoeve van de Amerikaanse strijdkrachten werd ontwikkeld. NAVSTAR staat voor NAVigation Satellite Timing And Ranging en zo heet het systeem formeel nog altijd. Het systeem zendt op twee frequenties constant signalen uit waarmee op de aardbol gebruik kan worden gemaakt voor navigatie, namelijk het Standard Position Signal (SPS) en het Precise Position Signal (PPS). SPS kan en mag worden gebruikt voor allerlei civiele toepassingen terwijl de PPS uitsluitend is bedoeld voor allerlei militaire doeleinden en derhalve maximaal is afgeschermd tegen virussen en andere storingen. Het totale gps systeem (NAVSTAR) bestaat uit drie segmenten:- control segment
- space segment
- user segment
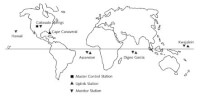
Het Control Segment draagt zorg voor de besturing en het beheer over het totale gps systeem. Het Control Segment bestaat uit het Master Control Station (gevestigd in Colorado Springs, USA) en vijf Monitor Stations. Die Monitor Stations staan op Colorado Springs en op de eilanden Hawaii, Kwajalein, Diego Garcia en Ascension. Alle monitor stations, met uitzondering van die op Hawaï, zijn uitgerust met grond antennes voor de communicatie met de gps satellieten (Uplink). Het Monitor Station volgt de gps satellieten passief waarbij afstand data en satelliet klok data van de satellieten wordt verkregen. Deze informatie wordt vervolgens naar het MCS gezonden waar de verwachte positie wordt berekend. Gecorrigeerde positie en klok data worden vervolgens met behulp van een Up-link bericht aan de satelliet gezonden voor een aangepaste NAVigation-message.

Het Space Segment bestaat uit de eerder al genoemde NAVSTAR gps satellieten die in zes verschillende banen en op een hoogte van 20.200 kilometer rond de aarde cirkelen. De satellieten staan onder een hoek van 55 graden ten opzichte van de evenaar, waarbij de zichthoek van een satelliet 28 graden bedraagt. Een enkele NAVSTAR satelliet ziet en bereikt (slechts) 42% van de aardbol, en elke satelliet voltooit een omloop rond de aarde in ongeveer 12 uur. De satellieten worden gebouwd bij de firma Rockwell en hebben een levensduur van 7,5 jaar.

Het User Segment (gebruikers gedeelte) van het NAVSTAR gps systeem wordt voor diverse doeleinden gebruikt o.a. navigatie voor lucht-, land-, zeevoertuigen, positiebepaling, tijdsbepaling etc. Het wordt bij een groot aantal militaire en civiele instanties over de gehele wereld onder de meest uiteenlopende omstandigheden en voor heel veel doeleinden gebruikt. Logisch dat er meerdere modellen en types gps ontvangers bestaan die aan deze meest uiteenlopende eisen kunnen voldoen. De firma Garmin maakt bijvoorbeeld kleine gps ontvangers speciaal bedoeld voor wandelaars en fietsers. De firma TomTom is zeer goed bekend onder de bestuurders van motorvoertuigen en is de ontwikkelaar en fabrikant van meerdere navigatiesystemen voor gebruik in auto en op de motor.
Navigatieprincipe
Het gebruik van navigatiesystemen gaat vrijwel routinematige en onbewust van wat er eigenlijk gebeurt. Hoe gaat het navigeren met satellieten feitelijk in zijn werk? De basis voor de correcte werking van een navigatiesysteem zoals NAVSTAR is een zogenaamde almanac, een database waarin satellietgegevens worden opgeslagen. Zo gauw een gps ontvanger wordt opgestart wordt de almanac geraadpleegd om ruwe satellietposities te verkrijgen. Die posities zijn afdoende om een positie te kunnen berekenen zij het dat die positie niet echt nauwkeurig is. Dan start de zogenaamde satelliet acquisitie en wordt er actief naar satellietsignalen geluisterd. Per satelliet waarvan het radiosignaal wordt ontvangen berekent de gps ontvanger de afstand tot de satelliet (tijd x lichtsnelheid 300.000 km/sec) en wordt het radiosignaal in de satelliet gesynchroniseerd door een atoomklok. Elke satelliet heeft 2 of 4 atoomklokken aan boord die nodig zijn voor een nauwkeurige tijdmeting. Deze klokken hebben een afwijking van één seconde in de zeven miljoen jaar.
Op zich valt er met een tweedimensionale positieberekening te leven, maar soms is een nauwkeuriger gegeven vereist. Dat kan worden bereikt zodra vier of meer satellieten worden gebruikt voor de positieberekening. In dat geval gaan gps ontvangers over op drie dimensionale positionering oftewel 3D navigatie. De aard ellipsoïde wordt niet meer gebruikt voor de berekening zelf maar de gps zal de afwijking ten opzichte hiervan weergeven.
De weg wijzen
TomTom en andere navigatiesystemen maken ook gebruik van de gps satellieten maar moeten nog een stap verder gaan. De gegevens die van de GPS satellieten afkomen zijn immers "slechts" coördinaten (posities op de aardbol) uitgedrukt in een lengte en een breedtegraad en daar heb je op zich weinig aan. Om een route te bepalen moeten al die coördinaten op een wegenkaart worden getekend en dan zou steeds tussen twee punten moeten worden gereden, het volgende punt opzoeken en weer rijden. Dat is wel heel erg lastig. Daarnaast zijn motorvoertuigen (maar ook wandelaars en fietsers) als het goed is voortdurend in beweging en moeten de coördinaten dus snel worden berekend.Navigatie via waypoints
Waypoints zijn groepen coördinaten die een bepaalde route (kunnen) voorstellen. Op een kaart wordt een aantal coördinaten bepaald en in een navigatiesysteem getoetst. Het navigatiesysteem vergelijkt vervolgens die coördinaten continue met de ontvangen gps gegevens, waardoor het dan mogelijk is om afwijkingen in de route vast te stellen zodat er tijdig kan worden bijgestuurd. Vluchtcomputers van een vliegtuig kunnen met waypoints worden geprogrammeerd om een bepaalde (vaste) route af te leggen. Het navigatiesysteem zorgt er dan voor dat het vliegtuig automatisch de in geprogrammeerde waypoints volgt, of dat de piloot wordt geïnformeerd over de locatie van de waypoints om het vliegtuig te besturen. Sommige kleine gps ontvangers (onder andere die van Garmin) kunnen ook met waypoints worden geprogrammeerd bijvoorbeeld voor een bepaalde toeristische fiets- of wandeltocht. De gps ontvanger leidt dan de gebruiker langs de ingevoerde waypoints die bijzondere en interessante plekken kunnen voorstellen. Het is overigens ook mogelijk om in TomTom systemen een coördinaat als eindbestemming in te voeren mocht de plaats van bestemming niet te selecteren zijn. Het systeem zoekt dan mogelijke routes uit om van het startpunt naar de eindbestemming te komen.
Digitaliseren
Misschien is dit voertuig eens op de weg gezien. Het is uitgerust met diverse moderne apparaten waarmee alle mogelijke informatie over routes kan worden gescand en waarmee ook gps informatie kan worden ontvangen. Die gps informatie wordt vervolgens met de gescande omgeving gesynchroniseerd en wordt later van een begeleidende stem voorzien. Bovenop het voertuig is de gps antenne te zien waarmee gps gegevens worden ontvangen, en de apparatuur die zijdelings van het voertuig uitsteekt bestaat uit LIDAR apparaten. LIDAR staat (volgens sommigen) voor Light Detection And Ranging en levert hoogwaardige beelden op met een zeer hoge resolutie. Die beelden worden omgevormd (gedigitaliseerd) tot grafische weergaven van wegen. Het voertuig wordt gebruikt om alle mogelijke wegen en straten in kaart te brengen waarna er in een laboratorium digitaal materiaal van wordt gemaakt. Afhankelijk van het type gps ontvanger kan dat digitale materiaal via een DVD worden ingelezen of kan een gps ontvanger via een download van kaartmateriaal worden voorzien.
Werking van de TomTom navigatie
Een gps systeem als TomTom navigeert in principe op dezelfde manier. Na het opstarten van het systeem zal het automatisch op zoek gaan naar satellietsignalen en als die worden gevonden vindt er eerst een ruwe schatting plaats met betrekking tot de plaats van vertrek. Die plaats wordt opgezocht in de database waarna wordt gekeken naar de gewenste plaats van bestemming. De gebruiker kan, in bepaalde gevallen, kiezen voor de kortste of de snelste route en in weer andere gevallen geeft het systeem aan dat er op een bepaalde route wel of geen nuttige plaatsen aanwezig zijn (tankstations bijvoorbeeld). Is de keuze op een routeoptie gevallen dan zoekt het systeem die route op en geleid zo het voertuig langs de coördinaten die eerder werden bepaald.De gebruiker krijgt ook waarschuwingen voor verkeerssituaties (indien aangesloten op een dienst) en waar en wanneer een afrit te gebruiken. Ook daarvoor geldt dat zo'n afrit zich op een bepaald coördinaat bevindt en dat de gps metingen vrij precies weergeven hoever het voertuig zich van die afrit bevindt. Er wordt een veilige marge gegeven voor het nemen van de afrit en in de meeste gevallen krijgt de gebruiker 2000 meter voor het bereiken van de afrit een waarschuwing dat die afrit aanstaande is.
Nieuwe omstandigheden
Bij sommige wegwerkzaamheden wordt aangeraden om de navigatie uit te zetten omdat er mogelijk nieuwe wegen zijn aangelegd die nog niet in kaart zijn gebracht. Het systeem "weet" dat natuurlijk nog niet en kan er geen wegwijs meer uit worden. Uitzetten is inderdaad een optie, maar het systeem kan ook gewoon aan blijven staan aangezien het voortdurend de gevolgde route controleert en tracht bij te stellen. Na verloop van tijd komt er een punt waarop de gps signalen weer overeenkomen met de daadwerkelijke positie van het voertuig (door de ontvangen gps informatie te vergelijken met de database) en verloopt de navigatie weer normaal. Tussentijds kan, bijvoorbeeld bij een lange file, het systeem worden geprogrammeerd om een alternatieve route te zoeken en soms, bijvoorbeeld wanneer het is aangesloten op een route informatiedienst, doet het systeem zelf voorstellen voor een alternatieve route.
Bedekkingsgraad
Het NAVSTAR is niet in staat om de gehele wereldbol te bestrijken (slechts 42%) en daarom is gps niet overal evengoed te gebruiken. Om dat te visualiseren gebruiken we even een wereldbol (globus) als model. Op een globus is de hele wereld te zien hoe die er werkelijk uitziet en biedt meer inzichten dan een vlakke landkaart. Op de bol is de verdeling te zien zoals die door Mercator is uitgevonden in lengte en breedtegraden. Om een redelijk evenwichtige verdeling te kunnen maken heeft Mercator er gemakshalve zo'n 10 graden aan elke kant van de aardbol afgeknipt zodat de wereld er in een Mercator projectie er enigszins afgeplat uitziet.Op zich en met andere navigatiemiddelen heeft dat weinig invloed, maar de GPS bedekking houdt nu precies rekening met die aanpassing. Hoe verder men naar de polen van de aarde reist, hoe minder de kwaliteit zal worden. De satellieten zijn ook niet altijd "online" en vereisen ook onderhoud. Dat onderhoud bestaat uit het uploaden van navigatieberichten en het controleren van de atoomklokken en uploaden van andere software. Dankzij de kromming van de aarde kan het ook een tijdje duren eer de satellieten "zichtbaar" zullen zijn zodat er signalen kunnen worden ontvangen. Tenslotte; het weer kan een grote spelbreker zijn en soms de behoorlijke ontvangst van gps signalen grondig in de weg staan. Dat betekent dan niet dat het niet bruikbaar is, want ook al bij twee satellieten kan een gps ontvanger al goed werken.